
در این مقاله قصد داریم به معرفی و بررسی مدل های تعقیب خودرو بپردازیم. پیچیدگی مدلسازی ریاضی رفتار رانندگی و عدم امکان پیاده سازی برخی از سناریوها در شرایط واقعی نیاز به سیستم های شبیه ساز ترافیکی را ایجاد کرده است. به کمک این شبیه سازها می توان نحوه عملکرد اجزا سیستم را به صورت جداگانه و هم چنین اندرکنش آنها با یکدیگر را که فرایندهایی پیچیده می باشند و مدلسازی ریاضی برای بررسی آنها با محدودیت هایی روبه رو است را به صورت پویا (Dynamic) مطالعه و بررسی کرد.
شبیه ساز های ترافیکی بر حسب میزان جزییاتی که ارائه می کنند به سه گروه کلی کلان نگر، خرد نگر و مزوسکوپیک تقسیم می شوند. نرم افزارهای بسیاری برای شبیه سازی ترافیک وجود دارد که از میان آنها می توان به PTV VISSIM، Aimsun و Synchro studio اشاره کرد.
در مدل های خرد نگر رفتار تک تک خودروها بر مبنای مدل های تعقیب خودرو (Car-following)، مدل های تغییر خط (Lane-changing) و پذیرش فاصله (Gap acceptance) شبیه سازی می شود. برخلاف شبیه سازهای خرد نگر، مدل های کلان نگر به رفتار تک تک خودروها کاری ندارند و به ویژگی های جریان ترافیک مانند جریان، چگالی و سرعت در سطح سیستم می پردازند.
(در این مقاله می توانید درباره ویژگی های جریان ترافیک و نمودارهای اساسی جریان ترافیک بیشتر مطالعه کنید).
یکی دیگر از کاربرهای مدل های تعقیب خودرو در توسعه سیستم های دستیار راننده (ADAS: Advanced Driver Assistance Systems) و خودروهای خودران می باشد که می تواند اهمیت خود را در پیشگیری از تصادفات و حفظ ایمنی سرنشینان و سایر کاربران مسیر نشان دهد.
مدل های تعقیب خودرو توصیف کننده نحوه دنبال شدن یک خودرو توسط خودروی دیگر می باشد. این مدل ها در واقع تعامل و واکنش یک راننده در برابر تغییراتی که توسط راننده خودروی جلویی ایجاد می شود را بررسی می کند. به عنوان مثال می توان به تصمیم گیری در مورد افزایش یا کاهش سرعت اشاره کرد. شتاب خودروی جلویی، سرعت مطلوب رانندگان و تفاوت سرعت بین آنها و همچنین فاصله بین خودروها از عوامل مهم تاثیرگذار بر روی رفتار تعقیب خودرو می باشند.
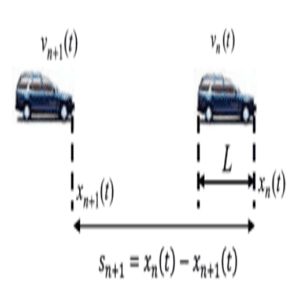
در شکل زیر مفاهیم مرتبط با مدل های تعقیب خودرو نشان داده شده است. در این شکل وسیله نقلیه n در حال تعقیب وسیله نقلیه n-1 می باشد و t زمان مشاهده را بیان می کند.  و
و  به ترتیب موقعیت وسیله نقلیه جلویی و وسیله نقلیه عقبی را در زمان t نشان می دهند.
به ترتیب موقعیت وسیله نقلیه جلویی و وسیله نقلیه عقبی را در زمان t نشان می دهند.
 و
و  سرعت این دو وسیله را در زمان t بیان می کنند و
سرعت این دو وسیله را در زمان t بیان می کنند و  طول وسیله نقلیه جلویی می باشد.
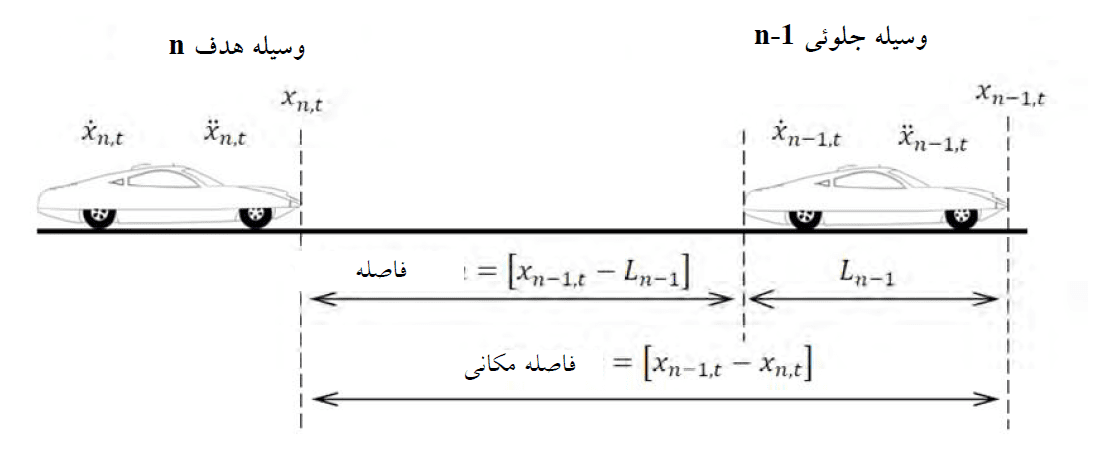
طول وسیله نقلیه جلویی می باشد. ![\displaystyle [{{X}_{{n-1,t}}}-{{X}_{{n,t}}}]](https://thep.ir/wp-content/ql-cache/quicklatex.com-74e5088cea77cb5d90cabe79867f2c55_l3.svg "Rendered by QuickLaTeX.com") فاصله مکانی بین دو وسیله نقلیه را نشان می دهد (فاصله سپر جلوی خودروی جلویی تا سپر جلوی خودروی عقبی).
فاصله مکانی بین دو وسیله نقلیه را نشان می دهد (فاصله سپر جلوی خودروی جلویی تا سپر جلوی خودروی عقبی). ![\displaystyle [{{X}_{{n-1,t}}}-{{X}_{{n,t}}}-{{L}_{{n-1}}}]](https://thep.ir/wp-content/ql-cache/quicklatex.com-865ecc977da9a05efc6c4067c0f9aac6_l3.svg "Rendered by QuickLaTeX.com") فاصله بین دو وسیله نقلیه در زمان t می باشد. علاوه بر موارد ذکر شده باید به زمان تاخیر عکس العمل راننده خودروی عقبی نیز اشاره کرد. این تاخیر فاصله بین تغییر ایجاد شده توسط خودروی جلویی (به عنوان مثال: کاهش سرعت به منظور توقف) تا زمانی که راننده خودروی عقبی به آن واکنش نشان می دهد را شامل می شود که همانگونه که پیشتر نیز به آن اشاره شد، نقش مهمی در مدل های تعقیب خودرو دارد.
فاصله بین دو وسیله نقلیه در زمان t می باشد. علاوه بر موارد ذکر شده باید به زمان تاخیر عکس العمل راننده خودروی عقبی نیز اشاره کرد. این تاخیر فاصله بین تغییر ایجاد شده توسط خودروی جلویی (به عنوان مثال: کاهش سرعت به منظور توقف) تا زمانی که راننده خودروی عقبی به آن واکنش نشان می دهد را شامل می شود که همانگونه که پیشتر نیز به آن اشاره شد، نقش مهمی در مدل های تعقیب خودرو دارد.
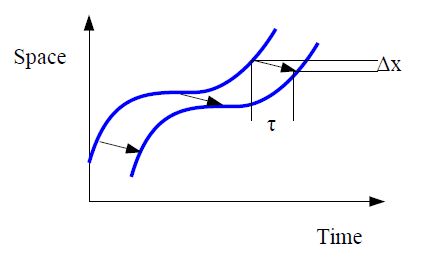
شاید بتوان ساده ترین حالت مدلسازی تعقیب خودرو را این گونه در نظر گرفت که خط سیر (trajectory) خودروی عقبی که با یک فاصله نسبت به خودروی جلویی در حال حرکت است، مشابه با خط سیر خودروی جلویی باشد. این رفتار را می توان در نمودار مکان-زمان نمایش داد (اگر با نمودار مکان-زمان آشنایی ندارید می توانید به این مطلب مراجعه کنید.). همانطور که در شکل مشخص است، خودروی عقبی با یک تاخیر زمانی نسبت به خودروی اول در حال حرکت می باشد.
روش های متنوعی توسط محققان برای مدلسازی رفتار تعقیب خودرو ارائه شده است. یکی از این روش ها مدل های مبتنی بر فاصله ایمن است که در این مدل ها فرض بر این می باشد که راننده فاصله خود را با خودروی جلویی به نحوی تنظیم می کند که بین آنها برخوردی صورت نگیرد.
با وجود دارا بودن یک ساختار منطقی، این مدل ها دارای محدودیت هایی هستند که در ادامه به آنها اشاره می شود. در این مدل ها سرعت متوسط که می تواند بر چگونگی حفظ فاصله اثر گذار باشد در نظر گرفته نمی شود. همچنین یک زمان تاخیر عکس العمل ثابت برای تمام رانندگان فرض می شود و تفاوت های فردی لحاظ نمی گردد. میزان افزایش و کاهش سرعت نیز ثابت فرض می شود که خود می تواند به فاصله گرفتن از واقعیت منجر شود. مدل های Pipes و Gipps دو نمونه شناخته شده از این نوع مدل ها هستند که در ادامه با جزییات بیشتری به آنها پرداخته می شود.
مدل های Pipes
فرض پایه مدل Pipes این است که برای دنبال کردن یک خودرو در فاصله ای ایمن، بهتر است به ازای هر مایل بر ساعت سرعت، به اندازه حداقل طول یک خودرو، بین خودروها فاصله طولی وجود داشته باشد. بر اساس این مدل، رابطه ای خطی بین سرعت و حداقل فاصله ایمن وجود دارد. رابطه ریاضی مربوط به این مدل به صورت زیر است:
![\displaystyle {{X}_{{n-1}}}={{X}_{n}}+[b+T{{\dot{X}}_{n}}]+{{L}_{{n-1}}}](https://thep.ir/wp-content/ql-cache/quicklatex.com-f54ea7c10d25c6d6d35849e8e3a52edb_l3.svg "Rendered by QuickLaTeX.com")
در این رابطه b فاصله قانونی توصیه شده در زمانی است که وسائل نقلیه ساکن هستند. T نیز یک ضریب ثابت زمانی است که مطابق با آنچه که مقررات رانندگی کالیفرنیا توصیه کرده است حدودا برابر با 1.023 ثانیه می باشد.
مدل Gipps
در مدل Gipps که در نرم افزار شبیه ساز ایمسان نیز از آن استفاده شده است ، هر خودرو بر حسب شرایط به دو نوع خودرو آزاد یا خودروی مقید شده به خودروی جلویی تقسیم بندی می شود. خودروی مقید شده سعی می کند برای به دست آوردن سرفاصله مکانی ایمن با خودروی جلویی، سرعتش را تنظیم کند در حالیکه سرعت خودروی آزاد بر اساس سرعت مطلوب و حداکثر شتاب محدود می شود. (در اینجا می توانید جزییات مربوط به پیاده سازی این مدل در نرم افزار ایمسان را مطالعه کنید.)
بر اساس این مدل، بیشترین سرعتی که یک خودرو می تواند در بازه زمانی (t, t+dt) به آن دست یابد به صورت زیر محاسبه می شود:

 : سرعت خودروی n در زمان t
: سرعت خودروی n در زمان t
 : سرعت مطلوب خودروی n
: سرعت مطلوب خودروی n
 : بیشترین شتاب برای خودروی n
: بیشترین شتاب برای خودروی n
 : گام زمانی شبیه سازی
: گام زمانی شبیه سازی
همچنین بیشترین میزان سرعتی که خودروی n می تواند در بازه زمانی (t, t+dt) و با توجه به ویژگی های خودش و محدودیت هایی که از سوی خودروی جلویی (n-1) برای او وجود دارد به آن دست یابد نیز به صورت زیر قابل محاسبه می باشد:
![\displaystyle {{V}_{b}}(n,t+dt)=d(n)T+\sqrt{{d{{{(n)}}^{2}}{{T}^{2}}-d(n)[2(x(n-1),t)-s(n-1)-x(n,t)-V(n,T)T-\frac{{V{{{(n-1,t)}}^{2}}}}{{{d}'(n-1)}}]}}](https://thep.ir/wp-content/ql-cache/quicklatex.com-67ced46cebcc9e8807f9bdffeaf39d46_l3.svg "Rendered by QuickLaTeX.com")
 : بیشترین شتاب منفی برای خودروی n
: بیشترین شتاب منفی برای خودروی n
 : موقعیت خودروی n در زمان t
: موقعیت خودروی n در زمان t
 : موقعیت خودروی جلویی در زمان t
: موقعیت خودروی جلویی در زمان t
 : طول موثر خودروی جلویی (n-1)
: طول موثر خودروی جلویی (n-1)
 : تخمین حداکثر شتاب منفی خودروی جلویی (n-1)
: تخمین حداکثر شتاب منفی خودروی جلویی (n-1)
T: زمان عکس العمل
سرعت وسیله نقلیه عقبی (n) در بازه زمانی (t, t+dt)، کمترین مقدار این دو سرعت خواهد بود:

مدل های GHR
یکی دیگر از مدل های استفاده شده برای بررسی تعقیب خودرو، مدل های GHR هستند که بر مبنای مدل های توسعه داده شده توسط محققین جنرال موتورز می باشند. در این مدل ها رابطه اصلی بین دو خودروی متوالی یک نوع تابع تحریک-پاسخ می باشد. این مدل ها شتاب وسیله نقلیه عقبی را متناسب با سرعت آن و اختلاف سرعت و سرفاصله مکانی دو وسیله نقلیه بیان می کنند. در این مدل ها فرض می شود که زمان عکس العمل برای همه رانندگان مشابه بوده و تفاوت های میان رانندگان انواع وسائل نقلیه در نظر گرفته نمی شود.
مدل های این گروه فرض می کنند که رانندگان حتی مقادیر کوچک محرک را می توانند تشخیص دهند که یک فرض غیر واقعی است. این مدل ها یک مقدار منفرد برای هر یک از سایر پارامترهای مدل شامل سرعت، سرعت نسبی و فاصله بین دو وسیله نقلیه فرض می کنند. تخمین یک مقدار منفرد برای هر یک از پارامترهای مدل تفاوت های فردی میان رانندگان مختلف و انواع وسائل نقلیه را نشان نمی دهد. به طور مثال رانندگان وسائل نقلیه ممکن است به طور متفاوتی در زمان حرکت در پشت کامیون های بزرگ رفتار کنند تا وقتی که پشت وسیله نقلیه شخصی هستند.
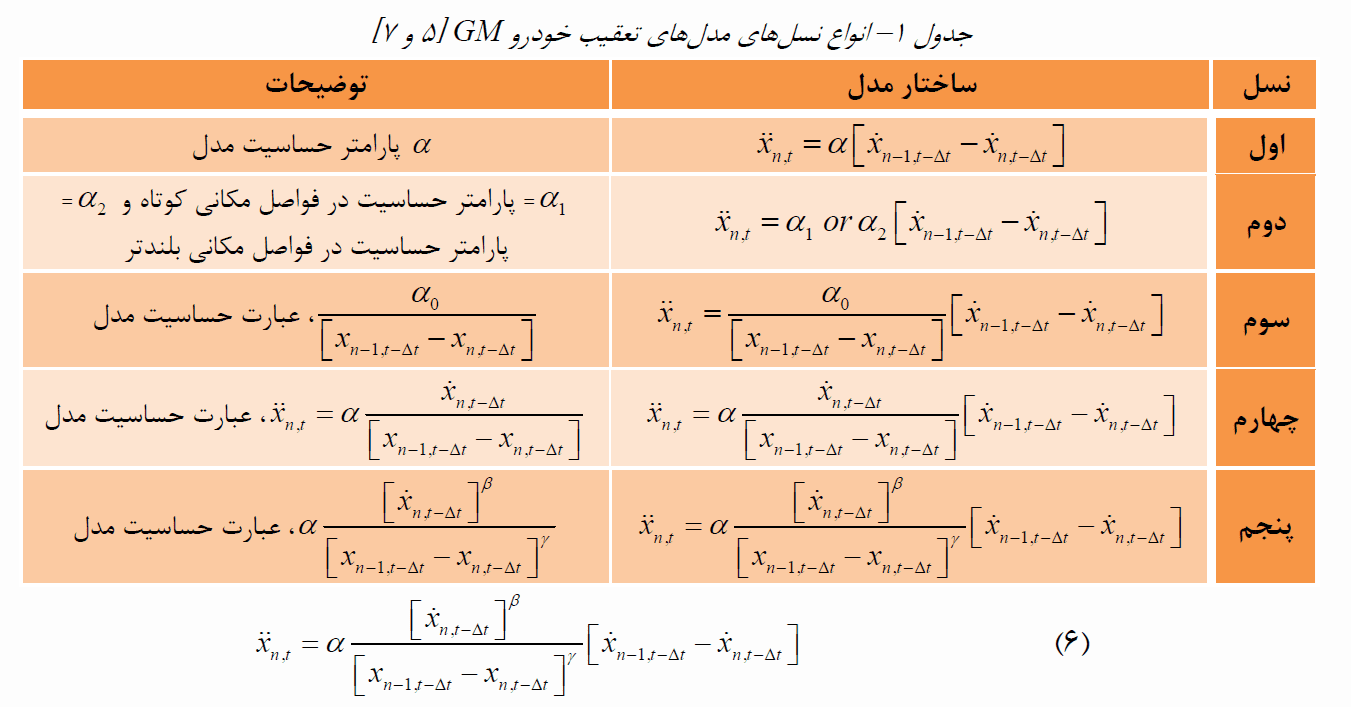
مدل های جنرال موتورز در پنج نسل توسعه داده شده اند. فرم کلی این مدل ها به این صورت است که واکنش راننده خودروی تعقیب کننده تابعی از میزان حساسیت راننده این خودرو و محرکی که از سوی خودروی جلویی ایجاد می شود می باشد. واکنش در این مدل ها کاهش و یا افزایش سرعت خودروی تعقیب کننده می باشد و محرک نیز بر اساس سرعت نسبی دو خودرو در نظر گرفته شده است. شکل زیر تغییرات این مدل ها را در طول زمان نشان می دهد.  ،
،  و
و  به ترتیب پارامترهای حساسیت، سرعت و فاصله مکانی می باشند. رابطه شماره 6، رابطه مربوط به مدل های GHR می باشد.
به ترتیب پارامترهای حساسیت، سرعت و فاصله مکانی می باشند. رابطه شماره 6، رابطه مربوط به مدل های GHR می باشد.
منابع:
مقایسه و بررسی انواع مدل های تعقیب خودرو
ارزیابی مدلهای شبیه سازی حرکت خودرو (car following) در نرم افزار های VISSIM و AIMSUN

پاسخها